

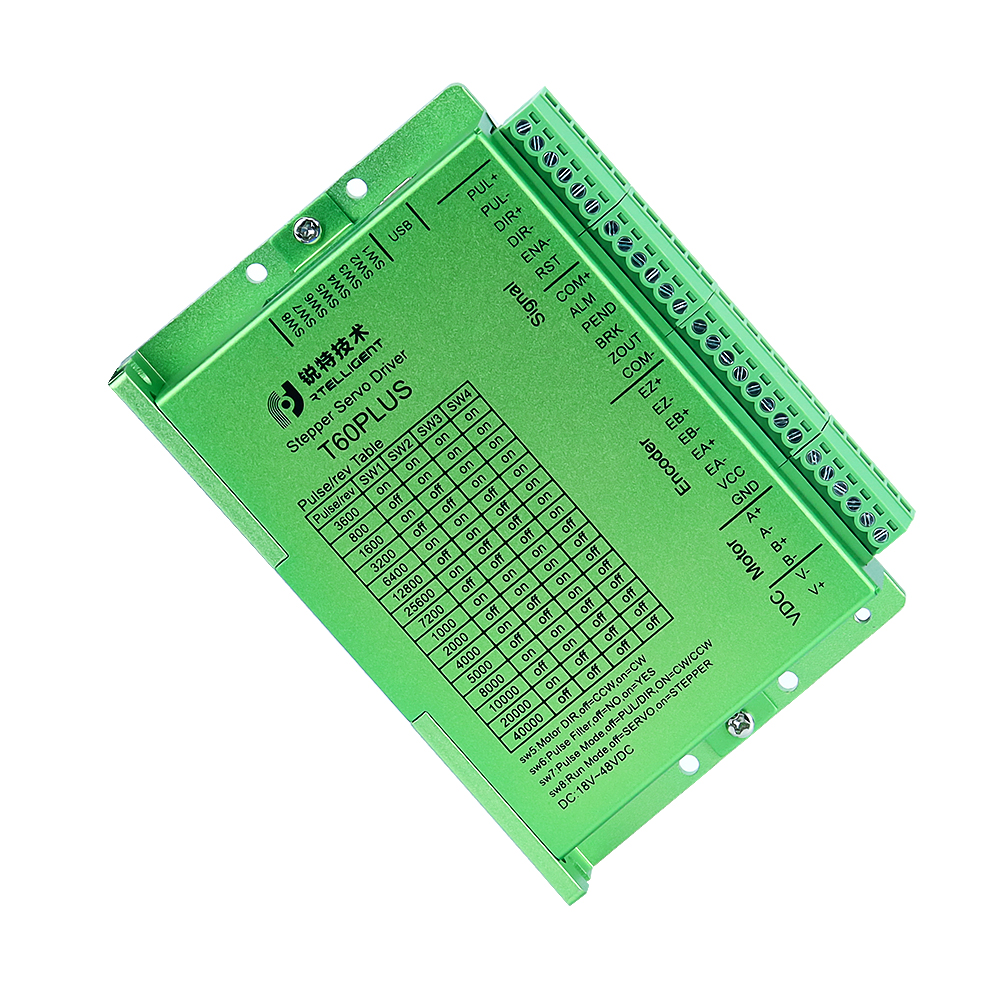


Pulzně řízený 2fázový krokový pohon s uzavřenou smyčkou T60Plus


Úvod k produktu



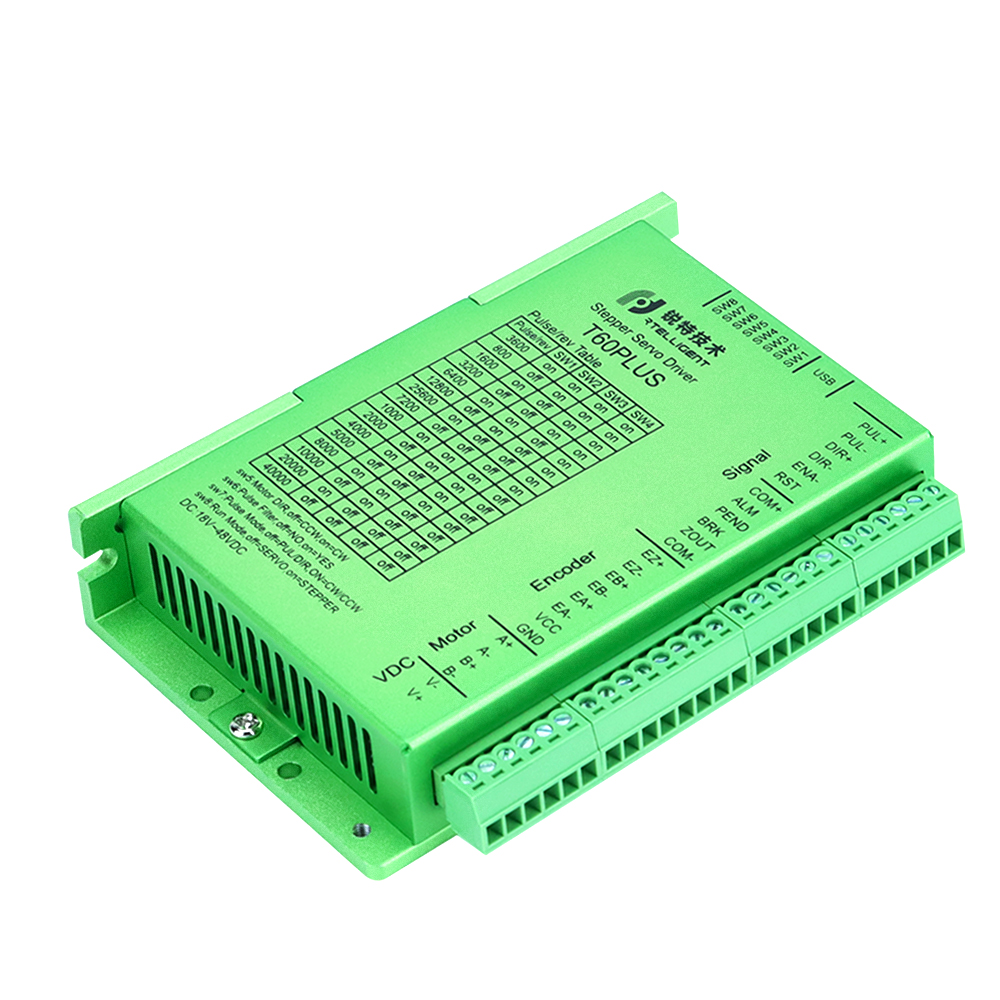
Spojení

Funkce
| Napájení | 18~48 V DC |
| Přesnost řízení | 4000 pulzů/ot |
| Pulzní režim | Směr a puls, dvojitý puls ve směru/proti směru hodinových ručiček, kvadraturní puls A/B |
| Řízení proudu | Algoritmus servo vektorového řízení |
| Nastavení dělení | Nastavení DIP přepínačů, 15 možností (nebo nastavení ladicího softwaru) |
| Rozsah rychlostí | Konvenční 1200~1500 ot./min, až 4000 ot./min |
| Potlačení rezonance | Automatický výpočet rezonančního bodu pro potlačení vibrací ve středních frekvencích |
| Nastavení parametrů PID | Ladicí software pro úpravu charakteristik PID motoru |
| Pulzní filtr | 2MHz digitální signálový filtr |
| Výstup alarmu | Výstup alarmu pro nadproud, přepětí, chybu polohy atd. |
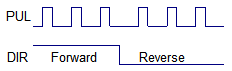
Pulzní režim
Signální rozhraní standardního měniče řady T má pulzní tvar a T60PLUS V3.0 dokáže přijímat tři typy pulzních povelových signálů.
| Pulz a směr (PUL + DIR) |
|
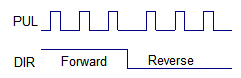
| Dvojitý puls (ve směru + proti směru hodinových ručiček) |
|
| Ortogonální puls (A/B ortogonální puls) | 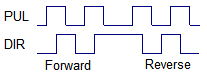 |
Nastavení mikrokroků
| Pulz/otáčky | SW1 | SW2 | SW3 | SW4 | Poznámky |
| 3600 | on | on | on | on | DIP přepínač je přepnut do stavu „3600“ a testovací software může volně měnit další pododdělení. |
| 800 | vypnuto | on | on | on | |
| 1600 | on | vypnuto | on | on | |
| 3200 | vypnuto | vypnuto | on | on | |
| 6400 | on | on | vypnuto | on | |
| 12800 | vypnuto | on | vypnuto | on | |
| 25600 | on | vypnuto | vypnuto | on | |
| 7200 | vypnuto | vypnuto | vypnuto | on | |
| 1000 | on | on | on | vypnuto | |
| 2000 | vypnuto | on | on | vypnuto | |
| 4000 | on | vypnuto | on | vypnuto | |
| 5000 | vypnuto | vypnuto | on | vypnuto | |
| 8000 | on | on | vypnuto | vypnuto | |
| 10 000 | vypnuto | on | vypnuto | vypnuto | |
| 20000 | on | vypnuto | vypnuto | vypnuto | |
| 40000 | vypnuto | vypnuto | vypnuto | vypnuto |
Nastavení mikrokroků
Spálené svorky pohonu?
1. Pokud je mezi svorkami zkrat, zkontrolujte, zda není zkratováno vinutí motoru.
2. Pokud je vnitřní odpor mezi svorkami příliš velký, zkontrolujte ho.
3. Pokud je do spoje mezi vodiči přidáno nadměrné množství pájení, čímž se vytvoří pájecí kulička.
Má krokový pohon s uzavřenou smyčkou alarm?
1. Pokud se vyskytne chyba v zapojení kabeláže enkodéru, ujistěte se, že používáte správný prodlužovací kabel enkodéru, nebo pokud z jiných důvodů nemůžete prodlužovací kabel použít, kontaktujte společnost Rtelligent.
2. Zkontrolujte, zda není kodér poškozen, například výstupní signál.
-
 Uživatelská příručka k Rtelligent T60PLUS V3.0
Uživatelská příručka k Rtelligent T60PLUS V3.0




